Para poder elegir la lámpara LED más conveniente, debemos conocer todos los parámetros que forman parte de sus especificaciones técnicas, que nos suministra el fabricante. A continuación vamos a tratar de explicarlos de una manera simple.

Especificaciones Técnicas de una lámpara LED
1) Potencia: P es la energía eléctrica que consume la lámpara durante cada segundo, mientras esté conectada a la red eléctrica y emitiendo luz. Se mide en Vatios (en español) o Watts (en inglés) y se abrevia como W.
Si al valor de potencia de la lámpara lo multiplicamos por la cantidad de horas que se encuentra conectada a la energía eléctrica, obtendremos el consumo de energía en Vatios hora (o Watts hora) de la lámpara en ese período. Lo abreviaremos como Wh.
Cuando estos números se hacen muy grandes, hablamos de Kilovatios, Kilowatts, Kilovatios hora, Kilowatts hora. Donde el prefijo Kilo significa mil. Las abreviaciones serán: KW, KWh, para potencia y consumo de energía respectivamente.
Valores típicos de potencia para lámparas LED pueden ser: 5W, 7W, 9W, etc
2) Flujo luminoso: F es la parte de la potencia irradiada por la lámpara que es percibida por el ojo humano como luz. Se mide en Lúmenes y se abrevia Lm.
La lámpara recibe potencia eléctrica, como vimos en el punto 1 y también irradia potencia. Solamente la parte visible de esa potencia irradiada es lo que medimos en lúmenes. Por ejemplo, una radiación infrarroja emitida por la lámpara no estaría incluída en los lúmenes emitidos por la lámpara, porque no es luz visible.
3) Eficacia de la lámpara: η viene dada por el cociente entre el flujo luminoso y la potencia de la lámpara necesaria para producirlo y se mide en lúmenes por vatio.
η [Lm/W] = F [Lm] / P[W]
Este parámetro es muy importante, ya que nos indica cuantos lúmenes de luz nos proporcionará la lámpara por cada vatio que consuma. Cuanto mayor sea la eficacia, tendremos más iluminación a menor costo. Y acá hablamos de eficacia porque el numerador y el denominador de la relación se miden en unidades distintas, al contrario de la eficiencia en que las unidades deben ser las mismas.
No siempre el fabricante nos proporciona la eficacia, pero siempre especifica el flujo luminoso en lúmenes y la potencia, de modo que haciendo el cociente de ambos valores podremos obtener la eficacia.
Los vendedores en Argentina normalmente no conocen la importancia de este parámetro y no lo especifican. Se limitan a especificar la potencia, sin hablar del valor del flujo luminoso. Hay que leer el envase de la lámpara para conocer el valor de la eficacia o el valor del flujo luminoso y la potencia.
4) Temperatura del color de la lámpara LED
La temperatura del color de una fuente luminosa indica el color de la luz irradiada por la fuente. Se mide en grados Kelvin, debido a que la gama de colores irradiados se toman de la temperatura que tendría un cuerpo negro al irradiarlos.
Usaremos la siguiente denominación:
Luz cálida: 2.700 K - 3.000 K
Luz intermedia: 4.000 K - 4.500 K
Luz fría: 5.000 K - 6.500 K

El fabricante indica en el envase de la lámpara LED el valor de temperatura de color de la misma.
5) CRI (Color Rendering Index en inglés; Índice de Reproducción cromática en español): Es una unidad que mide la capacidad de una fuente de luz para reproducir los colores de los objetos de manera fiel en comparación a una fuente ideal de luz, o una fuente natural como la luz del sol.
Este dato se mide en valores que van desde 0 a 100, considerando el 100 el valor que más se acerca a la perfección en cuanto a la reproducción de los colores.
6) Angulo de apertura: El ángulo de apertura de luz de una luminaria LED nos indica con qué ángulo se abrirá el haz de luz y por tanto, define el área que puede iluminar en función de la distancia a la fuente de luz.

7) Zócalo E27: indica un conector de tipo rosca Edison que tiene un diámetro de 27 mm. Era el zócalo más común de las lámparas incandescentes que usamos durante muchos años, de modo que Ud solo debe desenroscar la incandescente y enroscar la LED fácilmente.

8) Grado de protección IP de la lámpara: hace referencia a la norma internacional CEI 60529 Degrees of Protection, utilizada con mucha frecuencia en los datos técnicos de equipamiento eléctrico o electrónico, en general de uso industrial como sensores, medidores, controladores, etc. Específica un efectivo sistema para clasificar los diferentes grados de protección, aportados a los mismos por los contenedores que resguardan los componentes que constituyen el equipo, contra la entrada de materiales extraños (polvo, agua, etc.).

Por ejemplo IP [2] [0], o simplemente IP20 indica protección contra polvo y ninguna protección contra el agua, de modo que a esta lámpara la podemos usar en el interior de una casa, bajo techo como dormitorios, cocina, etc.
IP21 indica protección contra polvo y contra goteo vertical de agua.
IP23 indica protección contra polvo y contra lluvia.
9) Factor de Potencia de la lámpara:

P es la potencia media activa, dada por el fabricante, medida en vatios.
Q es la potencia reactiva, medida en volt - ampere reactivos.
S es la potencia aparente, medida en volt - ampere.Es igual a la tensión que se aplicará a la lámpara multiplicada por la corriente que circulará por ella.
Factor de potencia = cos φ = P / S
Obtener un valor confiable del factor de potencia es importante cuando se trata de una instalación que incluya muchas lámparas LED.
________________________________________________________________________
Etiqueta de Lámparas LED
La etiqueta debe contener lo indicado en la norma IRAM 62404-3: 2017
la marca comercial.
la potencia (W) verificada de acuerdo con lo indicado en el capítulo 8.
la tensión (V).
el flujo luminoso (lm), verificado de acuerdo con lo indicado en el capítulo 8.
los lúmenes por watt (lm/W), como cociente entre los valores de d) y b).
En el caso en que se indiquen los parámetros para diferentes tensiones, se deben señalar claramente los correspondientes a una tensión de 220V de valor eficaz a 50Hz del circuito de operación. Además en el embalaje se debe informar:

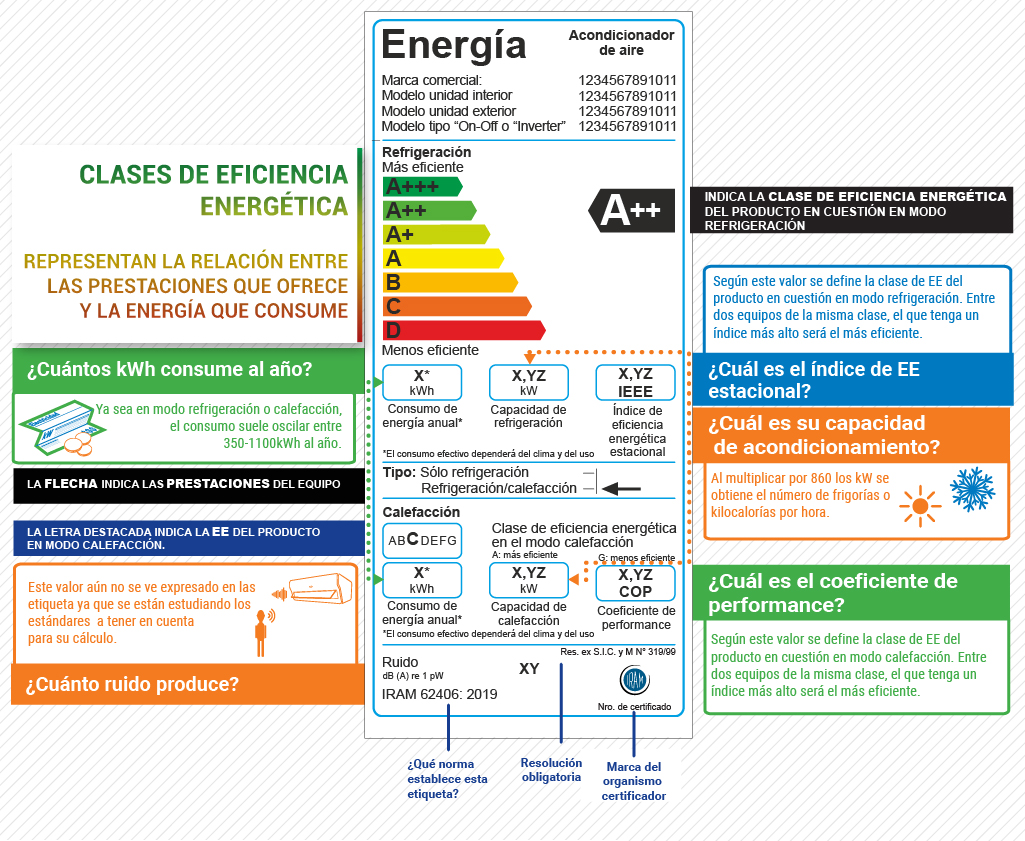
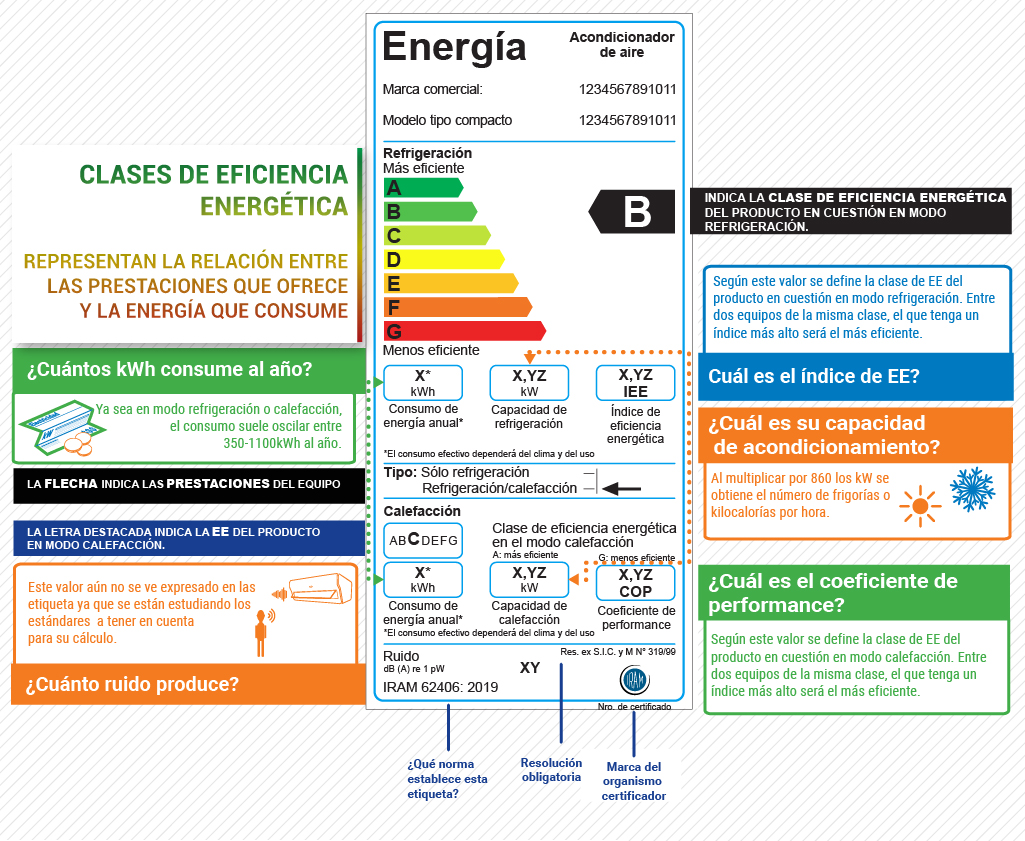
A partir de la publicación de la Resolución 795/2019 de la Secretaría de Comercio Interior que establece el cumplimiento obligatorio de la norma IRAM 62404-3, los usuarios podrán visualizar la clase de eficiencia de cada uno de estos productos
La norma IRAM 62404-3 establece los criterios para el etiquetado de lámparas led, y la Resolución N.º 795/19 lo reglamenta. La etiqueta informa al consumidor, en el momento de decidir la compra, la eficiencia energética de las lámparas led para iluminación general aptas para ser conectadas directamente a la red eléctrica en Argentina, presentando un sistema comparativo de siete clases identificadas por las letras y símbolos A++, A+, A, B, C, D y E. La medida de estas etiquetas debe ser de 36 x 73 mm (se ser necesario, de 36 x 61,5 mm) y puede ser poli- o monocromática (si la etiqueta no está impresa en el embalaje, se debe utilizar la versión policromática). La etiqueta debe marcarse en forma legible; impresa o adherida en la parte externa de cada embalaje individual sin que nada dificulte su lectura, y permanecer allí hasta que el producto haya sido adquirido por el consumidor final. El embalaje individual debe contener, como mínimo, marca comercial, potencia, tensión, flujo luminoso y lúmenes por watt (lm/W). Las lámparas led que quedan excluidas según la norma son aquellas cuyo flujo luminoso sea menor a 30 lm; comercializadas para funcionar con pilas o baterías; de color variable, o con diodos y/o revestimiento de color. +54-11 4346-0600 certielectrica@iram.org.ar www.iram.org.a
Referencias
https://www.voltimum.es/documentos/catalogos/bombilla-led-ultraeficiente?flippage=1&id=95859
https://www.voltimum.es/sites/www.voltimum.es/files/pdflibrary/documento_pdf.pdf
https://www.argentina.gob.ar/economia/energia/eficiencia-energetica/etiquetado-en-eficiencia-energetica
https://www.lciiluminacion.com.ar/docs/lci-iluminacion-catalogo-2021.pdf
https://www.google.com/maps/place/Mayorista+de+Electricidad+-+Lci+SRL/@-31.4258803,-64.4801551,11z/data=!4m5!3m4!1s0x9432a3adc250eaf9:0x9c54032fcc942d53!8m2!3d-31.4685949!4d-64.2063803
https://wellmaxgroup.com/?gclid=Cj0KCQjw1bqZBhDXARIsANTjCPIX2_-LphkZnfhzsGS0t7kw6pDx2v0bNSwH4oDfEBtUcrNUO8_bhJQaAttoEALw_wcB
http://www.eficienciaenergetica.org.ar/
https://www.argentina.gob.ar/sites/default/files/i.3_-_pablo_paisan_iram_-_normas_iram_para_etiquetado_de_ee_0.pdf
https://www.igan-iluminacion.com/blog/que-color-de-luz-led-es-mejor/#:~:text=Luz%20c%C3%A1lida%20(2200%2D2700k),Blanco%20frio%20(5000%2D6500k)
(Resolución 795/2019 de la Secretaría de Comercio Interior que establece el cumplimiento obligatorio de la norma IRAM 62404-3): https://trinomio.com.ar/certificacion-de-eficiencia-energetica-de-lamparas-led/
https://www.aisledlight.com/choose-right-beam-angle-led-lights/







{kind=link}